Partial Contour Matching
基于轮廓点夹角的方法
Riemenschneider(2010)提出了一种基于形状的物体识别方法,该方法将图像中的曲线段和模板轮廓线进行匹配,就用到了部分匹配的方法。
轮廓片段的描述
文章采用的曲线描述方式来自作者更早的工作(Donoser,2009),该工作用于描述和比较完整闭合轮廓。 而(Riemenschneider,2010)则将描述稍作改进,用于描述非闭合曲线。
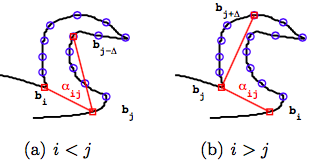
一个形状的轮廓曲线(或者图像中的非闭合曲线)首先要等距采样为一个点序列 . 然后用一个矩阵描述每三个点之间的夹角。 这是一个的矩阵,其中的元素定义如下。 下图就是一个示意图,显示了定义角度的两种不同情况。
角度组成的矩阵就可以描述轮廓片段的特征。 下面是一些基本的轮廓元素对应的矩阵。 其中,第一行是(Donoser,2009)的矩阵; 第二行是(Riemenschneider,2010)改进后的矩阵。 根据矩阵元素的定义,这种描述轮廓片段的方式天然的具有平移和旋转不变性,但是没有尺度不变形。 后续的匹配和识别算法要在多个尺度上进行。 该矩阵的另一个特点是,通过沿着对角线进行移位,可以解决闭合轮廓在采样为点序列时起始位置选择的问题。

匹配算法
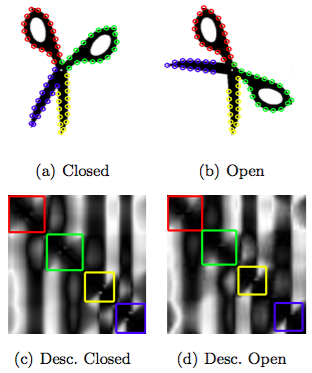
首先定义匹配。两条曲线的某一部分相匹配,就是对应的角度矩阵中沿着对角线的两个子矩阵差异比较小。下图比较了一把合拢的剪刀和一把张开的剪刀的轮廓曲线,可以明显看到四组对应的子矩阵。
形式化的定义如下,和是两条曲线对应的描述矩阵,下面定义了从上的r点开始的长度l的片段和从上的q点开始的长度为l的片段的差异度。 我们设两条曲线长度分别为M和N,不妨设M较小,那么,所有的不同的片段的差异度就构成了一个三维的张量(tensor),或者说N个的矩阵。因此,我们可以把D视作一个张量。
快速计算张量D,需要用到一点技巧,积分图像(integral image),用于快速计算图像中的任意矩形区域的特征(比如矩形区域像素和)。文章(Viola,2001)详细描述了该方法。一个图像i的积分图像ii中的每一个点的值是该点左上的矩形区域内像素值的和,即. 这样,任意的矩形区域的和可以由积分图像快速计算(常数时间)。 快速计算张量D的方法是,首先计算N个不同的积分图像,分别对应于将矩阵沿着其对角线移位得到的N个不同的矩阵和矩阵的差值的积分图像。有了这N个积分图像,就可以快速计算张量D了。
在张量D的基础上,进一步筛选长度和相似度符合要求的匹配。为此,定义如下的函数。 进一步将这个函数转化为2元函数,,就可以求得该函数的局部极大值,这些局部极大值就对应于一些满足长度和相似度要求的匹配。
识别物体:假设投票
在上面的匹配过程中,假设曲线A1是模板(reference),曲线A2是测试图像中的曲线(query)。那么,得到的每一对匹配就表示模板有可能出现在图像之中,并且可以估计出现的位置,这就构成了一个假设,于是可以用大量匹配进行假设投票。 投票的结果就是物体识别的结果。
在(Donoser,2009)中,作者采用了另外的方法进行形状提取。 与物体识别不同,形状提取不需要考虑背景线条的影响,也不考虑线条可能会破碎。 形状提取需要考虑的主要因素是,两个形状在多大程度上相似。 对于存在差异的两个形状,对比的局部越小,差异度就越小;对比的局部越大,差异度就越大。 作者的方法遵循了这样的观点,在(Bronstein,2009)中,对部分相似性进行了形式化的定义和计算。
参考文献
- Riemenschneider, H., Donoser, M., & Bischof, H. (2010). Using partial edge contour matches for efficient object category localization. In ECCV 2010.
- Donoser, M., Riemenschneider, H., & Bischof, H. (2009). Efficient partial shape matching of outer contours. In ACCV 2009.
- Viola, P., & Jones, M. (2001). Rapid object detection using a boosted cascade of simple features. In CVPR 2001.
- Bronstein, A. M., Bronstein, M. M., Bruckstein, A. M., & Kimmel, R. (2009). Partial similarity of objects, or how to compare a centaur to a horse. IJCV, 84(2), 163-183.